Anti-noise Microphone Supplies Anti-noise Microphone,Anti-noise Mini Microphone,dynamic Anti-noise Microphone ,Anti-noise Microphone for headsets Gaoyou Huasheng Electronics Co., Ltd. , https://www.yzelechs.com
Read the structure, drive and technical indicators of industrial robots
This article provides a detailed introduction to the structure, driving methods, and technical specifications of industrial robots by combining text with illustrations. First, let’s explore some of the commonly used types of robotic arms.
1. Cartesian Operating Arm
One of the most straightforward designs, the Cartesian arm operates in a linear motion along three axes—X, Y, and Z. Its advantages include ease of computer control and high precision. However, it has several drawbacks such as obstructed workspace, a large footprint, slow movement speed, and poor sealing capabilities. These arms are typically used in tasks like welding, handling, loading, packaging, palletizing, demolition, testing, flaw detection, sorting, assembly, labeling, coding, spraying, target following, and even detonation activities.
2. Articulated (Hinge-type) Operating Arm
Articulated robots resemble the human arm, making them the most common industrial robot design due to their complex range of motion. They excel in applications such as rapid testing and product development in sectors like auto parts, mold-making, sheet metal fabrication, plastics, sports equipment, glass, ceramics, aviation, and more. Additionally, they are widely used in three-dimensional measurements, error detection in manufacturing quality control, rapid prototyping of artifacts, vehicle on-site measurements, and human body shape analysis for medical equipment production, cosmetic surgeries, and custom body shaping.
3. SCARA Operating Arm
SCARA robots are particularly adept at assembly tasks. Their key advantage lies in their flexibility within the XY plane and their rigidity along the Z-axis, making them highly selective and flexible. These robots are frequently employed in large-scale assembly operations for printed circuit boards and electronic components. Other uses include object handling like integrated circuit boards, plastics industries, automotive sectors, electronics, pharmaceuticals, and food processing. They also play a role in moving parts and performing assembly work.
4. Spherical Coordinate Type Operating Arm
This type of arm offers a large working area around its central base, with two rotating drives that are relatively easy to seal, providing extensive coverage. However, the complexity of its coordinate system makes control challenging, and the linear drive components can present sealing issues.
5. Cylindrical Coordinate Operating Arm
Cylindrical robots calculate movements simply and can utilize hydraulic pressure for linear motion, allowing them to generate significant power. They are capable of reaching into cavities but are limited by the space their arms can access, unable to reach areas close to columns or the ground. Additionally, their linear drive parts are difficult to seal and protect from dust, and during operation, the rear of the arm may interfere with other objects in the workspace.
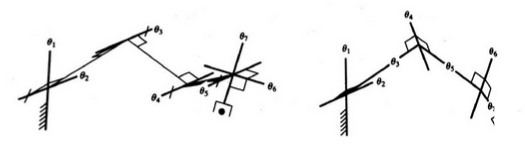
6. Redundant Mechanism
Most spatial positioning tasks require six degrees of freedom, but adding extra joints can help robots avoid singular configurations. The image below illustrates a seven-degree-of-freedom operating arm configuration.
Industrial robots continue to evolve, integrating advanced technologies to enhance their capabilities in various fields. As industries become increasingly automated, the demand for versatile and efficient robotic solutions remains ever-growing.