Receiver Supplies,Dynamic Receiver supply,Cordless Telephone Round Receiver,Dynamic Receiver for Telephone Gaoyou Huasheng Electronics Co., Ltd. , https://www.yzelechs.com
Read the structure, drive and technical indicators of industrial robots
This paper provides a comprehensive overview of the structure, driving mechanisms, and key technical indicators of industrial robots, blending visuals with detailed descriptions. We’ll explore various types of robotic arms and their applications to give you a clearer understanding.
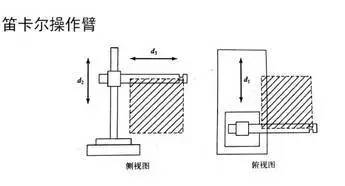
Firstly, let’s look at the Cartesian robotic arm, which is widely used due to its straightforward computer-controlled operation and high precision. These arms excel in tasks requiring accuracy but face challenges like obstructed workspaces, large footprints, and slower movement speeds. They’re ideal for welding, handling, packaging, palletizing, and even more specialized tasks like flaw detection and sorting. Their flexibility makes them particularly suited for batch production across multiple product lines, ensuring consistent product quality and faster updates.
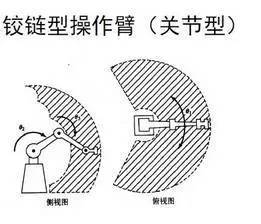
Next, we have the articulated robotic arm, resembling a human arm with rotating joints. This design allows for more complex movements and is the most common structure in industrial robotics. Articulated arms find applications in rapid prototyping of automotive parts, mold production, sheet metal fabrication, and even creating replicas of artifacts or sculptures. They’re also crucial in industries like aerospace, where precision is paramount. Additionally, these robots are used in three-dimensional quality control checks, body assembly, and even medical applications such as body scanning and prosthetic design.
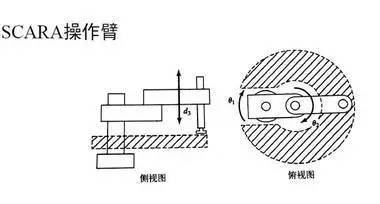
Another significant type is the SCARA robotic arm, known for its flexibility in the x-y plane and excellent stiffness along the z-axis. SCARA robots are particularly effective in assembly operations, especially for printed circuit boards and electronic components. They’re also utilized in moving and picking tasks, such as handling integrated circuits, and are prevalent in industries like plastics, automotive, electronics, pharmaceuticals, and food processing. These robots simplify repetitive assembly processes and improve efficiency.
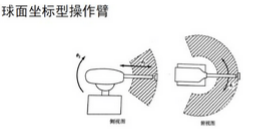
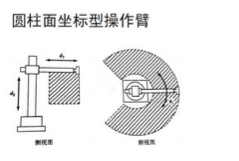
The spherical coordinate robotic arm offers a large working area around its central base, with easy-to-seal rotary drives, providing extensive coverage. However, its coordinate system is complex, making control challenging. Additionally, the linear drive components may face sealing issues.
Cylindrical robotic arms, while simple to calculate and capable of delivering high power, have limited reach. They struggle to access spaces close to the pillar or the ground, and their linear drive parts are hard to seal or dustproof. Furthermore, the rear arm may collide with objects in its path during operation.
Finally, redundant robotic arms with more than six degrees of freedom offer added flexibility, helping to avoid singular configurations. A seven-degree-of-freedom arm is depicted below, showcasing how this extra joint increases operational versatility.
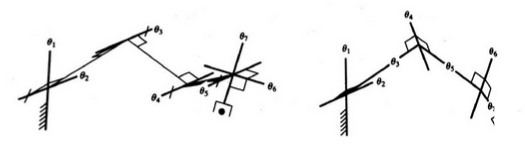
In conclusion, each type of robotic arm brings unique advantages and limitations to different industrial applications. Understanding these differences helps industries optimize their processes and improve productivity. As technology advances, we can expect further innovations in robotic capabilities, enhancing efficiency and expanding potential uses across sectors.