Abstract: From the perspective of engineering practicality and maintenance. An online calibration algorithm for vehicle integrated navigation system is proposed. The algorithm uses Kalman filter as the estimation tool to effectively calibrate the error items to be calibrated by the path that tends to the general motion state. The simulation Kalman filter results show that the algorithm makes the error items to be calibrated gradually converge in a short time according to the vehicle trajectory, so as to achieve the purpose of calibration in the general sports car experiment without disassembling the inertial device. This online calibration method is extremely convenient for practical use and maintenance. This article refers to the address: http:// For the laser gyro strapdown integrated navigation system, the main error sources that affect the system accuracy are: scale factor error of inertial device, zero error and shaft mounting misalignment angle. In order to ensure the alignment and navigation accuracy of the system, the above error sources must be accurately calibrated using a precision turntable. And compensated by system software. 1 Online calibration algorithm 3 Conclusions Through simulation analysis. Verify the feasibility of the online calibration algorithm for the vehicle integrated navigation system. This method basically estimates the error of the relevant strapdown inertial navigation system by the normal driving process of the vehicle, but there are still some areas for improvement. In the filtering method and the practicability, rapidity and convenience of improving navigation accuracy, It can be considered to be implemented with SINS/GPS/OD federated filtering or adaptive filtering.
Solar Street Light is mainly applied in engineering projects. With the advantages of high luminous flux, super long lifespan, average 70% energy save, low maintenance cost and wide color temperature options, it is a perfect replacement for conventional halogen and sodium street light.The Led lamp is made of high- quality aluminum alloy material, with unique air convection design. Easy to install and use,secure and reliable. It has infrared ray inductive probe, when someone is approaching, the light will be all light for 60 seconds. But the people is leaving away, the light will be reduce1/3 lightness automatically, to save the energy.
80W Integrated Solar Street Lights 80W Integrated Solar Street Lights,80W Smart Solar Street Light,80W Solar Street Lights,80W Integrated Solar Street Lamp Yangzhou Bright Solar Solutions Co., Ltd. , http://www.cnbrightsolar.com
Key words: integrated navigation system; online calibration; Kalman filter; path design; incentive
Under normal circumstances, after the system calibration is completed, if the gyro and accelerometer are not reassembled, the mounting angle of the gyro and accelerometer will remain basically unchanged. However, the gyro drift and the accelerometer zero have successively initiated non-repetitive errors, especially after a long period of time, which will cause a large difference with respect to the calibration value, so that the system cannot meet the alignment and navigation accuracy requirements. To solve this problem, the inertial navigation system is usually removed from the carrier every few months and mounted on a turntable to recalibrate the gyro drift and add zero to improve system performance. Obviously, this kind of processing method is cumbersome in practical use and maintenance.
In order to improve this situation and achieve the purpose of extending the periodic calibration period, an online calibration algorithm for the error system of the integrated navigation system is proposed. The algorithm is based on the difference between GPS high-precision position and velocity information and the navigation output of the strapdown system itself. The position velocity of the Strapdown Inertial Navigation System is used as the observation of the filter, and the basic error term of the inertial navigation system is used. With the added offset, scale factor error and the gyro's constant drift error as the state quantity, the GPS positioning error is considered to be zero-mean white noise, and the Straight Inertial Navigation System error and device error are estimated by the corresponding estimation method. Compensation for the constant error term of the integrated navigation system.
1.1 Coordinate system definition This paper defines i as the geocentric inertial coordinate system, e is the earth coordinate system, n is the navigation coordinate system ie east-north-day coordinate system, and b is the carrier coordinate system ie right-front- Upper coordinate system.
1.2 Design of Kalman Filter For the vehicle integrated navigation system, the installation error of the system is considered to be unchanged during the periodic calibration period. The main object of the calibration is the offset coefficient error and the constant error term of the inertial device.
Therefore, the Kalman filter here selects the system error term and the gyro, the added constant error and the added scale coefficient error as the filtering state quantity, which is 14 dimensions. 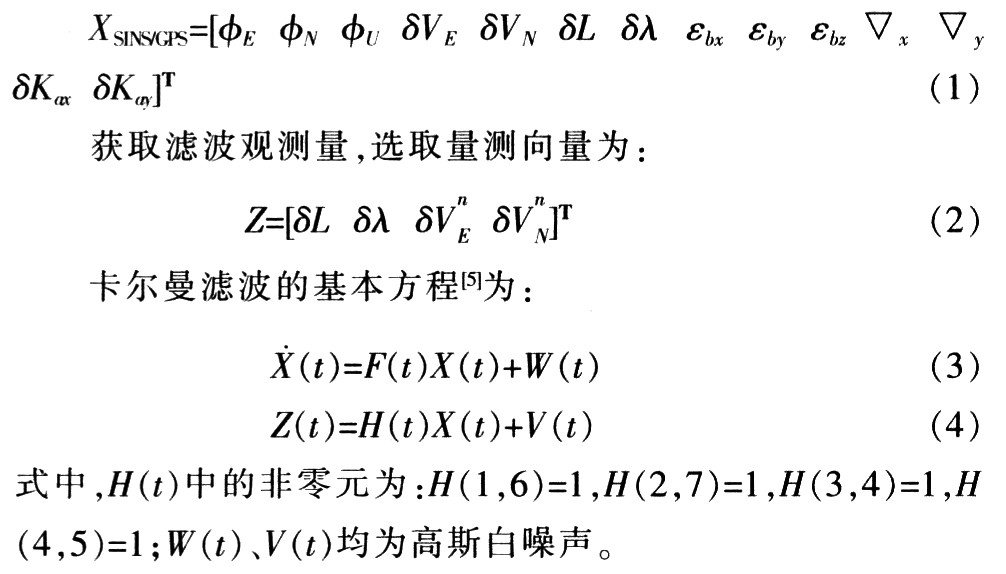
2 Simulation verification and analysis
2.1 Path design The designed SINS/GPS filter is simulated for 1 200 s. The specific path is described as follows: 0~100 s, the vehicle body is stationary, the position is (108.9l, 34.245); 10l~310 s The car body accelerates to the north to 10 m/s. The axial acceleration of the carrier is 1m/s2, and it moves northward to 310 s at a speed of 10 m/s. The position at this time is (108.91, 34.265); 311-500 s, the body starts from 311 s. Turning east, while the eastward acceleration starts to 10m/s, the axial acceleration of the carrier is lm/s2, the northward speed is reduced to 0, and the vehicle body moves eastward at a speed of 10 m/s to 500 s; 501~l 200 s, The car body turns northward from 501 s, and accelerates to 10 m/s in the north direction. The axial acceleration of the carrier is lm/s2, the eastward speed is reduced to zero, and the car body moves northward at a speed of 10 m/s to 1 200 s. .
2.2 Simulation results The online calibration algorithm of the vehicle integrated navigation system is simulated by writing the trajectory generator, strapdown inertial navigation algorithm and Kalman filter combined navigation algorithm. The specific simulation results are shown in Figure 1~3. 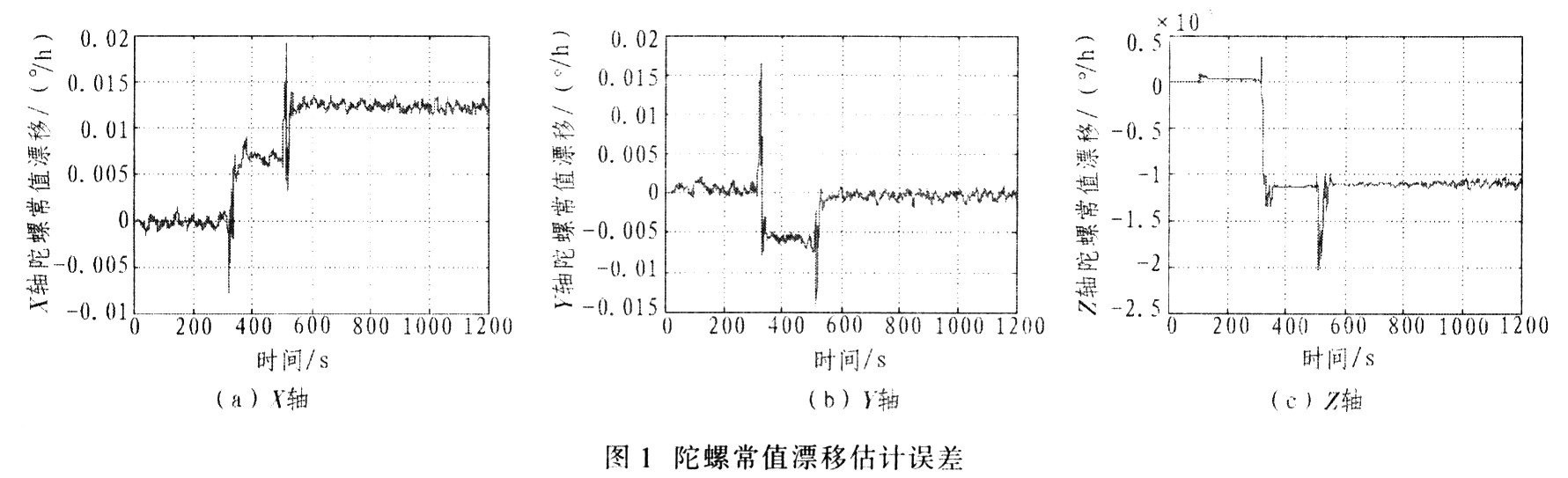
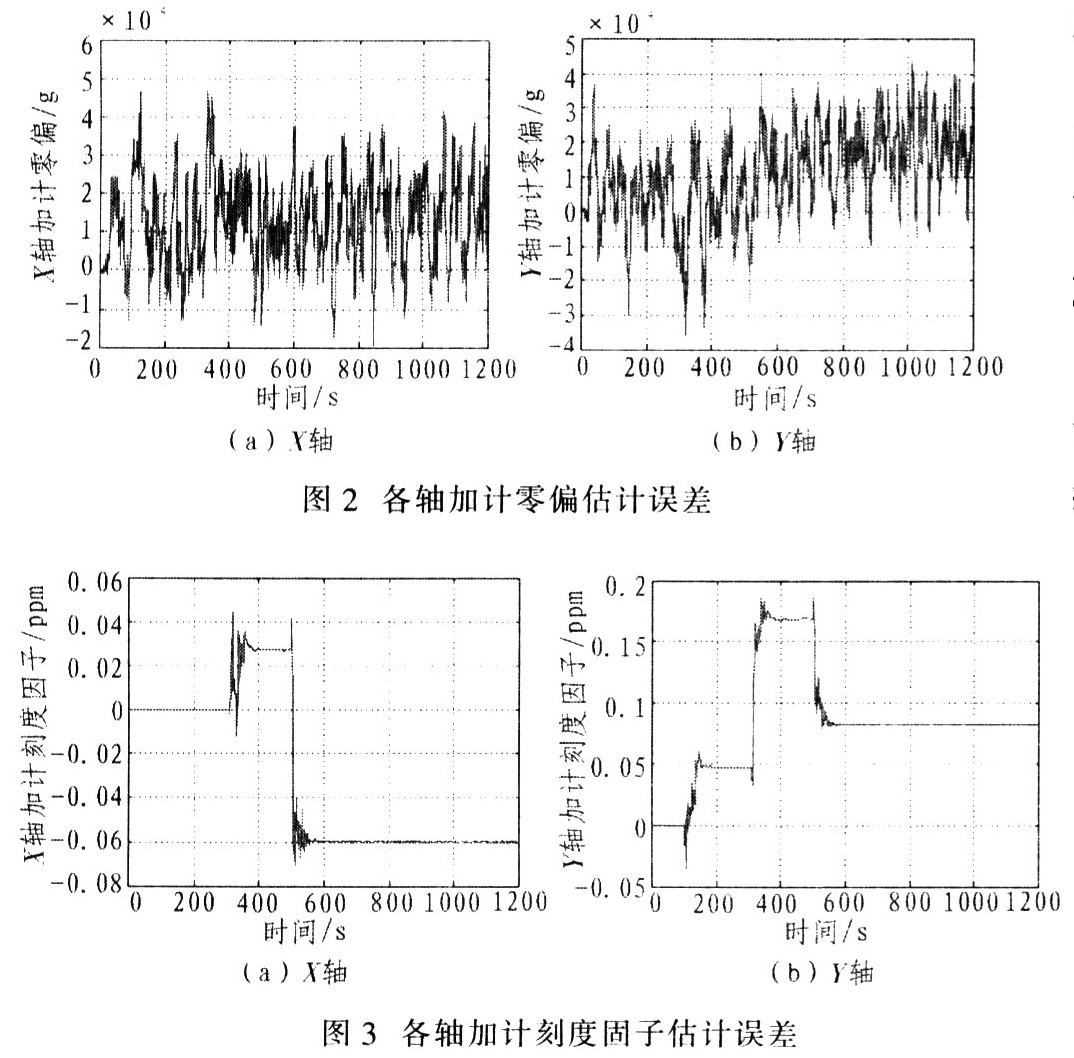
2.3 Analysis of simulation results Analysis of the Kalman filter simulation estimation results can be obtained:
1) When the vehicle body performs horizontal acceleration motion, the horizontal attitude error begins to converge, and the estimated effect is related to the magnitude and duration of the acceleration. When there is acceleration input on each axis of the vehicle body, the added scale factor error can be estimated.
2) When there is a certain horizontal acceleration of the car body, the corresponding axis plus zero starts to converge. Since the gyro drift to the speed error requires two integrations, the speed position measurement is slow for the gyro drift estimation, especially the sky direction. Gyro.
3) Due to the use of velocity observation, the velocity error can be quickly and accurately estimated. From the principle of inertial navigation system, the conclusion that the attitude error is easy to obtain can be obtained, but the estimation of other errors is generally slow.